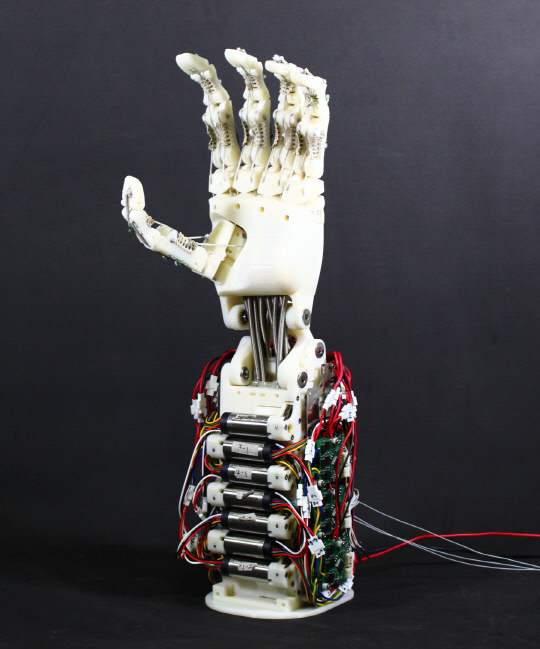
한기대에 따르면 `플렉스 핸드`는 한국연구재단의 바이오닉암 메카트로닉스 융합기술개발사업의 지원을 받아 수행된 연구결과물로 총 15개의 자유도를 가져서 사람 손과 유사하게 복잡하고 정교한 동작을 할 수 있을 뿐만 아니라 다른 고자유도 로봇 손이 할 수 없는 큰 힘과 충격을 받는 작업도 가능하다.
한 손가락 끝으로 4㎏ 이상을 들 수 있으며 작은 물체를 정밀하게 조작할 수 있을 뿐만 아니라 망치질 등의 충격이 있는 작업도 가능하다. 손바닥과 손가락에 베어링이나 금속경첩 등 기존의 부품들을 사용하지 않았기 때문에 경량화·저가화가 가능한 실용성을 갖춘 기술로 평가받고 있다.
김 교수 연구팀은 지난 6월 프랑스에서 열린 `ICRA 2020(The 2020 International Conference on Robotics and Automation)`에서 `IEEE RA-L 최고 논문상(IEEE Robotics and Automation Letters Best Paper Award)`을 수상하기도 했다.
ICRA는 매년 개최되는 세계 최대 규모의 로봇 학회이며 RA-L은 최고 수준의 국제 로봇 학회들과 연계하여 엄선된 논문을 출판하는 저널로, 김 교수의 `고자유도 로봇 손 플렉스 핸드`에 관한 논문이 이 중 최고 논문으로 선정된 것이다.
김 교수와 연구팀은 이번 연구 결과물을 기존에 개발해온 `로봇팔 AMBIDEX`와 결합해 고성능화에 관한 연구를 수행하고 향후 인공 의수 등으로 활용할 계획이다.
김용재 교수는 "기존의 로봇 손 기술을 적용하는데 머무르지 않고 인간 손의 원리에 대한 연구와 창의적인 아이디어를 도출하고 검증한 끝에 플렉스 핸드를 개발할 수 있었다"고 말했다. 황진현 기자
<저작권자ⓒ대전일보사. 무단전재-재배포 금지>